Combining voxel and normal predictions for multi-view 3D sketching
Jan 1, 2019·, ,·
0 min read
,·
0 min read
Johanna Delanoy
David Coeurjolly
Jacques-Olivier Lachaud
Adrien Bousseau
Abstract
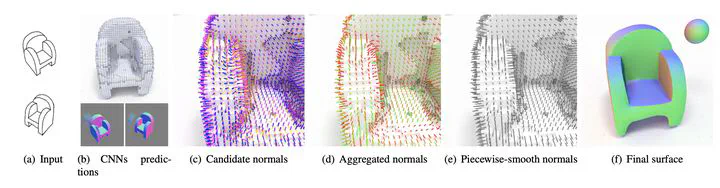
Recent works on data-driven sketch-based modeling use either voxel grids or normal/depth maps as geometric representations compatible with convolutional neural networks. While voxel grids can represent complete objects – including parts not visible in the sketches – their memory consumption restricts them to low-resolution predictions. In contrast, a single normal or depth map can capture fine details, but multiple maps from different viewpoints need to be predicted and fused to produce a closed surface. We propose to combine these two representations to address their respective shortcom- ings in the context of a multi-view sketch-based modeling system. Our method predicts a voxel grid common to all the input sketches, along with one normal map per sketch. We then use the voxel grid as a support for normal map fusion by optimizing its extracted surface such that it is consistent with the re-projected normals, while being as piecewise-smooth as possible overall. We compare our method with a recent voxel prediction system, demonstrating improved recovery of sharp features over a variety of man-made objects.
Type
Publication
Computers & Graphics, 82: 65-72, 2019
Deep Learning
Multi-View Reconstruction
Discrete Geometric Estimator
3D
Digital Geometry Application
Authors
Professor of Computer Science
My research interests include digital geometry, geometry processing, image analysis, variational models and discrete calculus.